
软机器人
-
中国的软机器人实现了深海探索和自由游泳
ECNS)-一个中国研究团队已经使用仿生软机器人完成了深海探索,该机器人还实现了10,000米深度的自由游泳。由浙江大学和中国研究院浙江实验室的研究人员共同进行的这项研究发表在《自然》杂志上。
中国软机器人
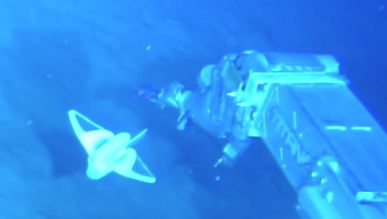
基于蜗牛鱼的设计,仿生深海软机器人实现了两项关键技术突破。
它具有适应深海静水压力的软硬融合机系统,以及适用于深海高压和低温环境的新型介电弹性体致动器。
浙江实验室的李国瑞表示,研究团队将继续研究深海软件智能设备的能量,驱动力和感知能力的集成系统,以提高仿生深海软机器人的智能。 -
位于世界上最深处的软机器人
在一组中国科研机构的主持下,一组科学家开发出了一种机器人聚合物容器,该容器在克服湖泊和海洋深处的巨大压力方面没有问题。该机器人的形状像溜冰鞋,首先在70米深的湖泊中进行了测试,最后在海洋最深处的玛丽亚纳斯海沟(Marianas Trench)进行了测试,该机器人位于水面以下11,000米处。电子部件以柔软的硅树脂拉伸成溜冰鞋脊的形状,即使在最高压力下也可以轻松推动鳍片,从而使机器人能够移动。这样的机器人船不需要大面积的勘探,因为它们不需要昂贵的外壳来保护电子设备免受破坏性压力。美国宇航局已经选择诺斯罗普&
软机器人

 微信收款码
微信收款码 支付宝收款码
支付宝收款码